<500K hrs of high-quality physical-interaction data exists globally today, vs. tens of millions needed to train generalist policies.
DATA DESERT
Built for frontier robotics and VLA labs training models for industrial environments. We capture multimodal data inside real plants, synced with MES, historian, SCADA, and ERP. State and action pairs, trajectories, and the simulation and evaluation stack we are building for one vertical with design partners.
// THE DATA DESERT
Robotics foundation model data still underrepresents industrial process work: valves, lines, gauges, cleanrooms, refineries, and production cells with live telemetry. That is the missing training frontier for physical AI infrastructure.
[HAZ] /---/
Chemical plants, refineries, fabrication yards, and heavy industrial sites require hazardous environment robotics data.
[REG] |key|
Safety certifications, compliance controls, and facility trust determine whether data can be captured at all.
[SITE] X--X
Industrial sites need embedded operators, safety controls, and operator demonstrations for VLA systems.
ERP |+|
Training signal comes from synchronized RGB and process data, PLC data robotics training, and facility metadata.
OK [==]
State-action pairs dataset outputs and trajectory data for robotics are checked by process domain experts.
BOT ->>
The output is shaped for simulation and evaluation harnesses, training, and sim-to-real transfer industrial robotics pilots.
Which valve, which chemical, which plant SOP data for robotics, and what MES, DCS, SCADA, historian, and ERP systems saw.
// ROADMAP
Trekion ships in three layers. The data layer is live. The simulation and evaluation stack is in active build with design partners across three verticals. Deployment partner pilots come from the verticals where the flywheel is already spinning.
Multimodal capture in real plants, synced with MES, historian, SCADA, and ERP. State and action pairs, trajectories, scene and task descriptions. Robot-transferable formats. We capture the workflows lab-trained models cannot see.
The moat. Whoever owns the simulator that matches the physics, layouts, and SOPs of a vertical, and the evaluation harness that measures policy performance against real operator benchmarks, owns the data flywheel for that vertical. Trekion is building this layer now with design partners. Three verticals are in active evaluation: discrete manufacturing, construction, and oil and gas. The vertical that pulls hardest gets the simulator and evaluation harness first.
Real-world testing environments and facility access. Once the data and Sim + Eval flywheel is spinning in a vertical, Trekion becomes the deployment partner for the labs whose policies are validated against the harness.

// DATA SURFACE
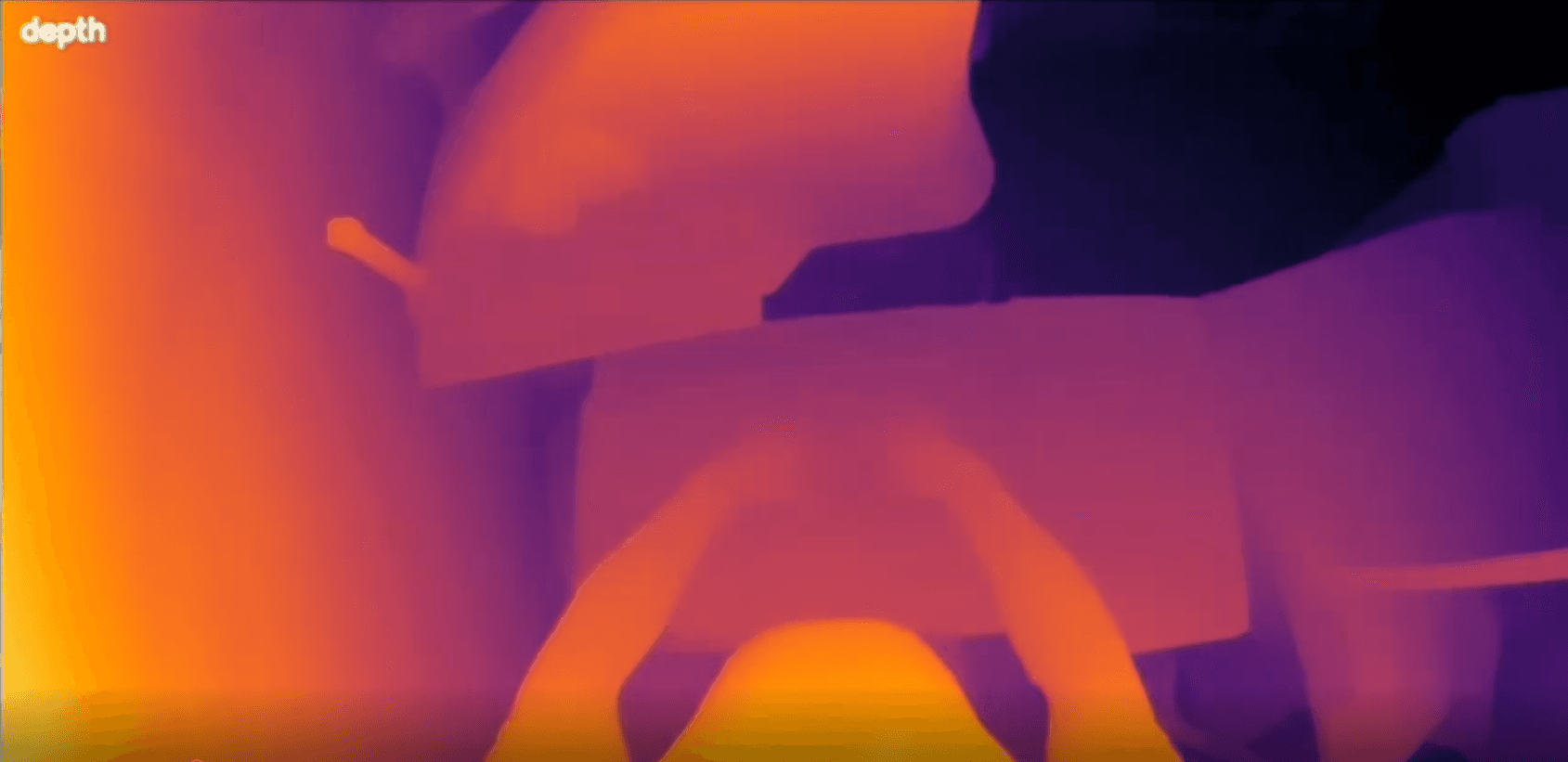
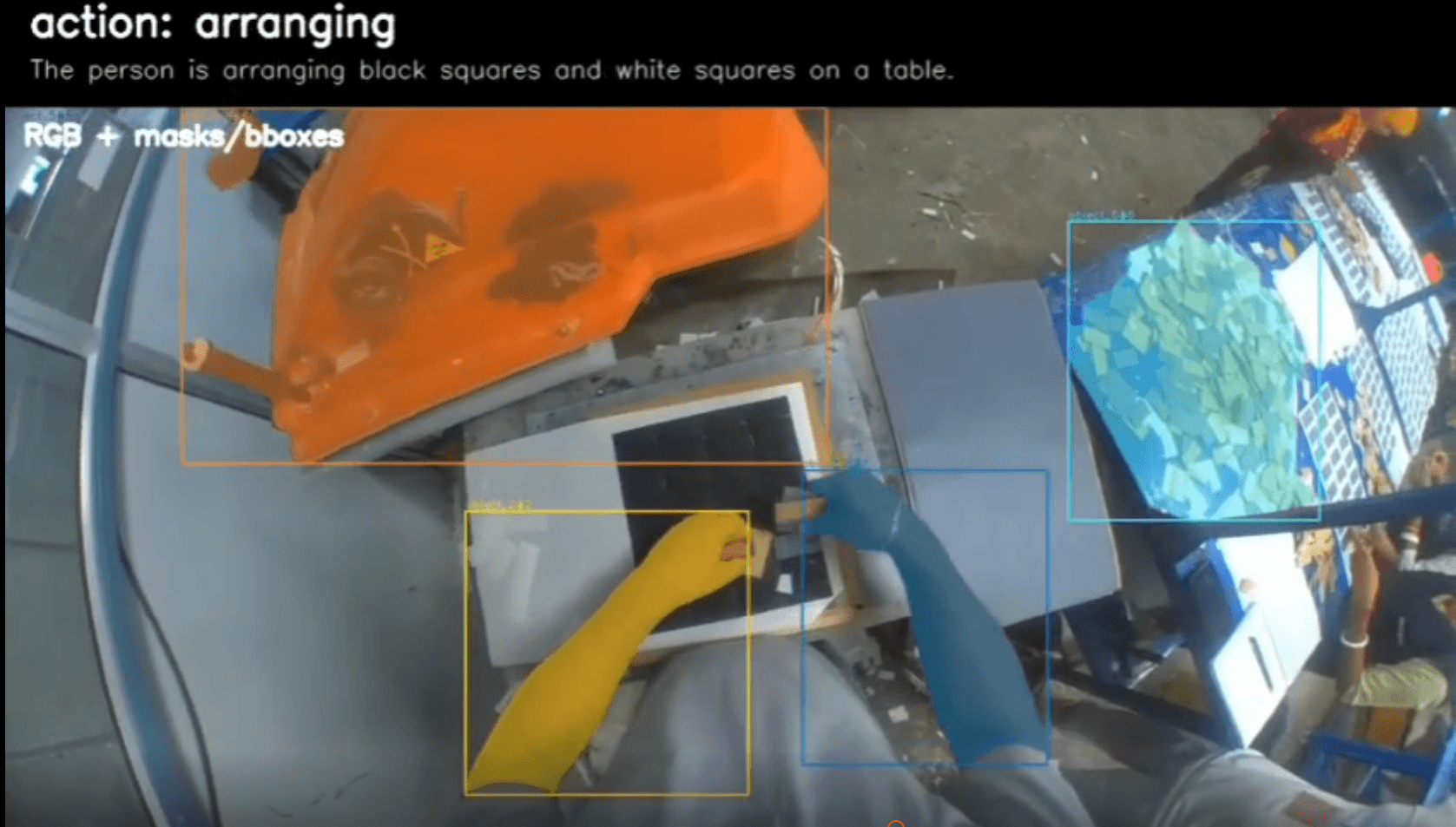
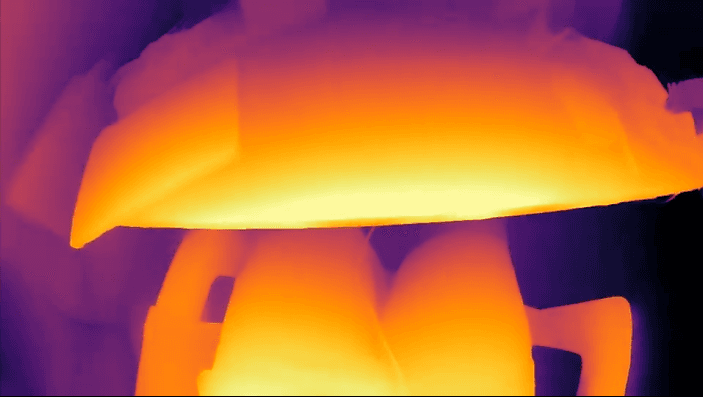
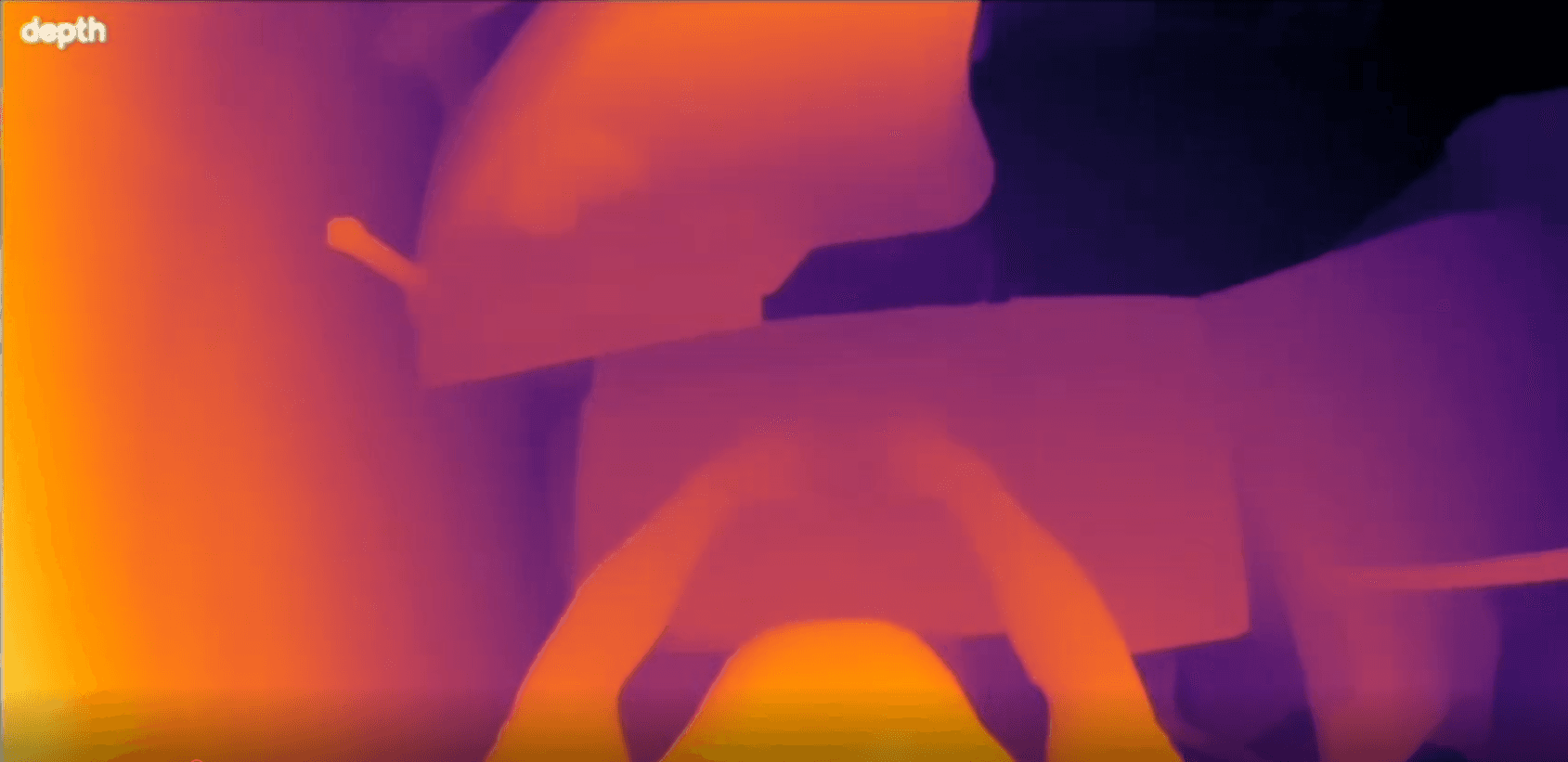
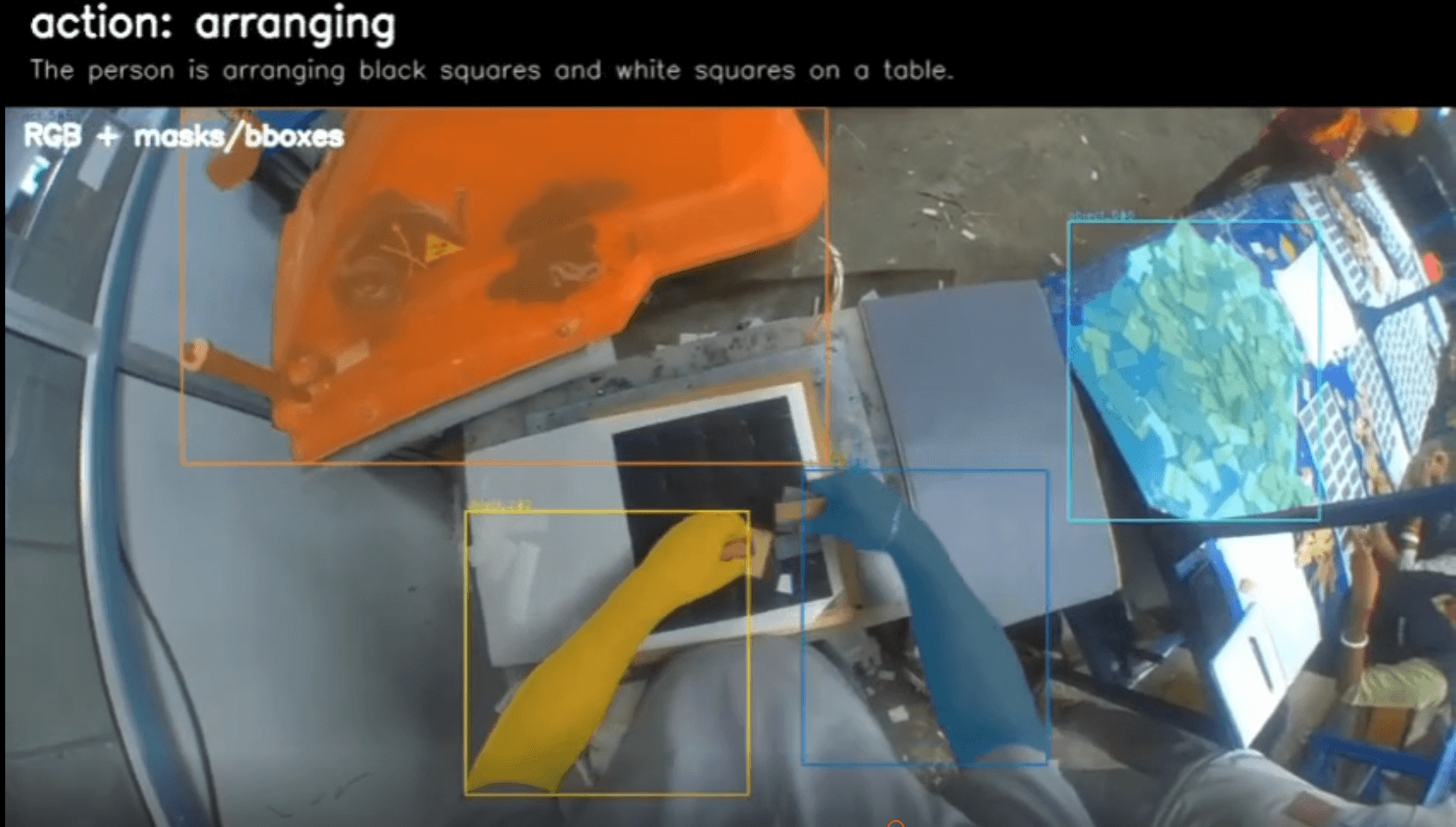
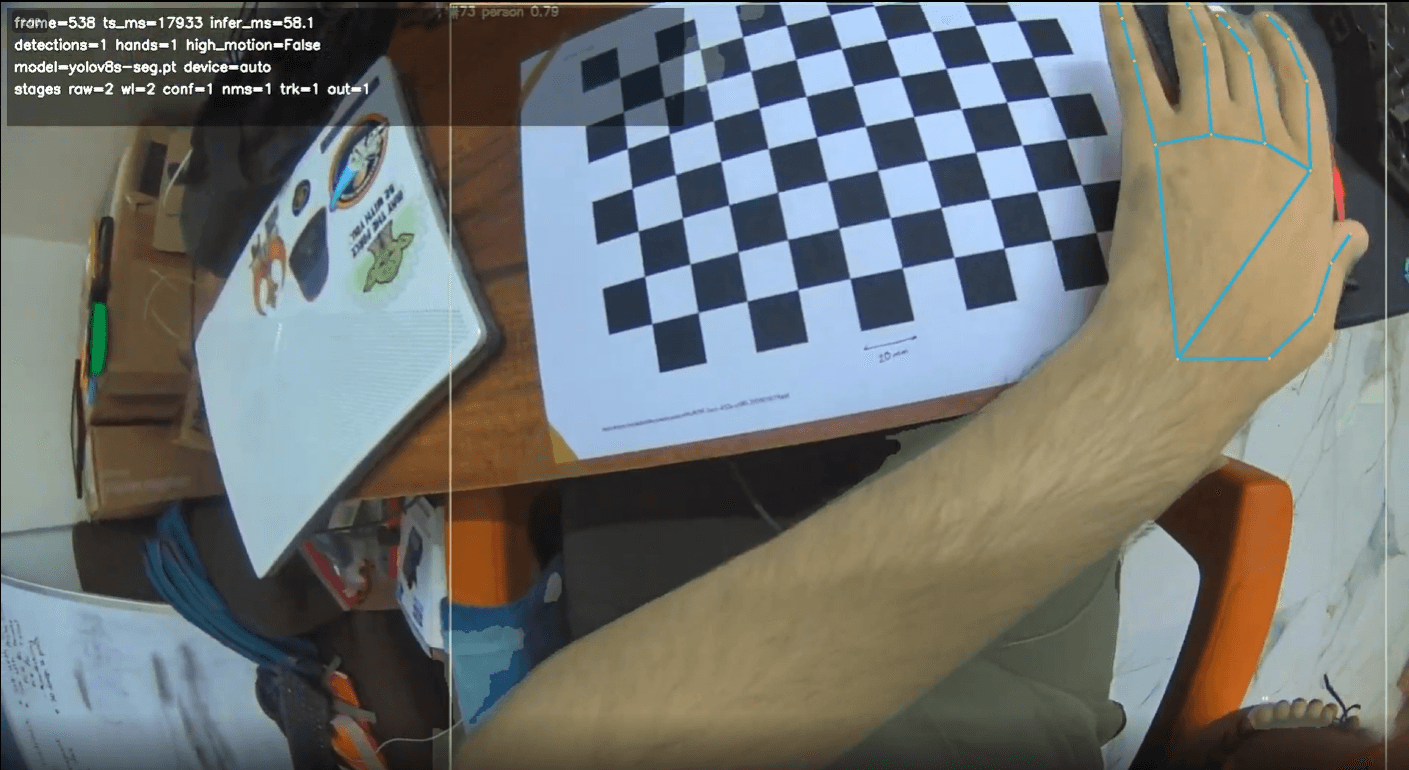
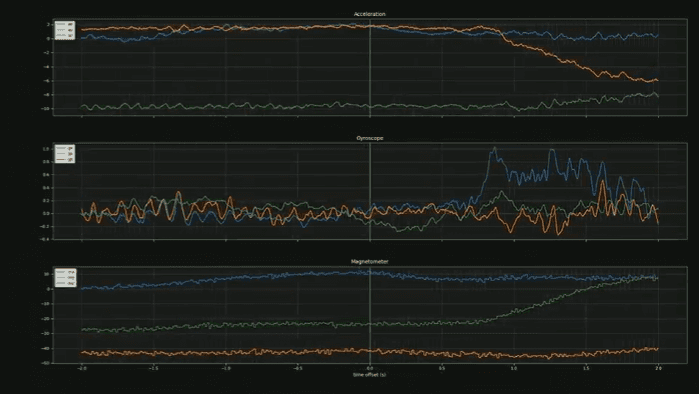
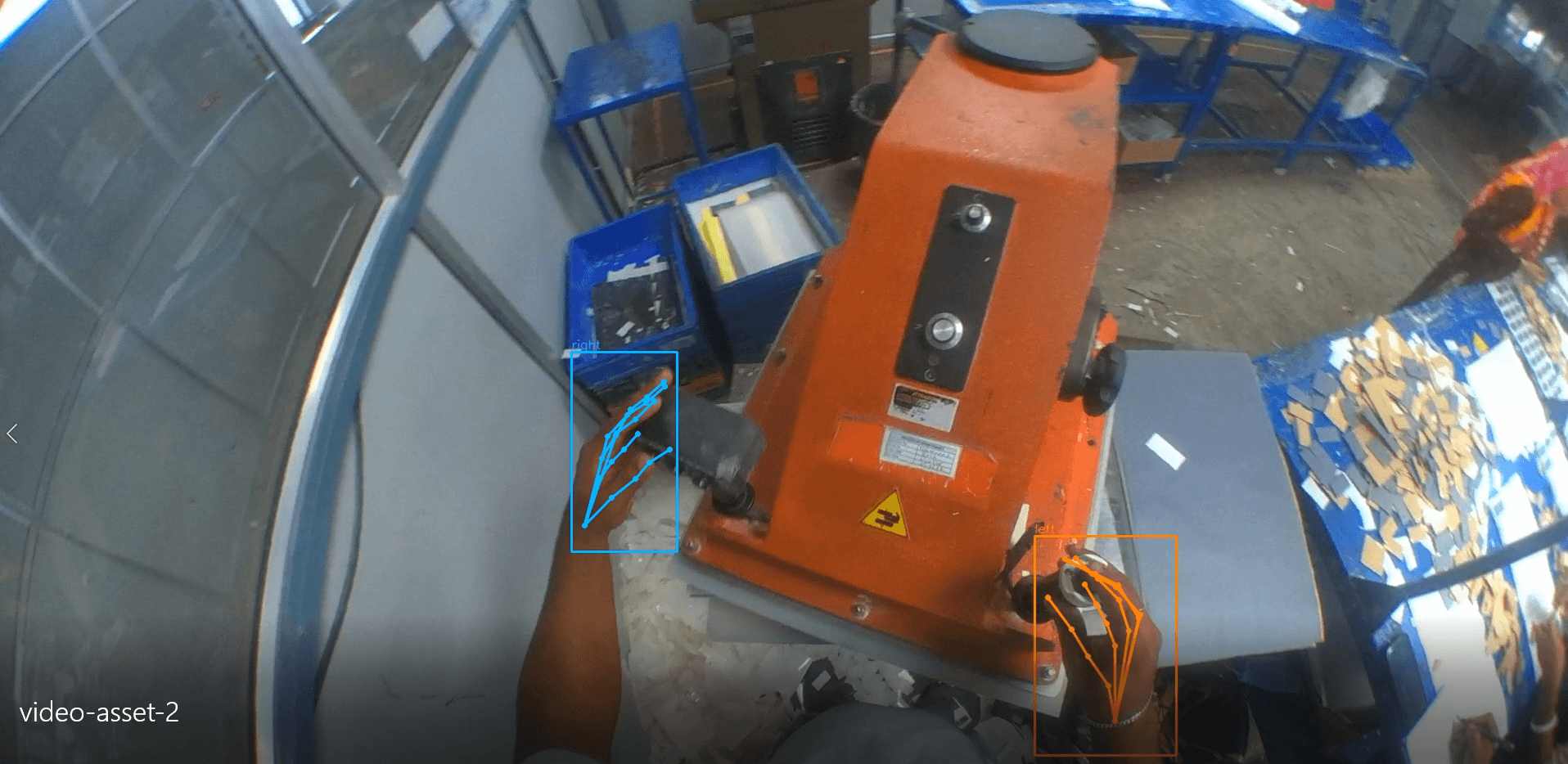
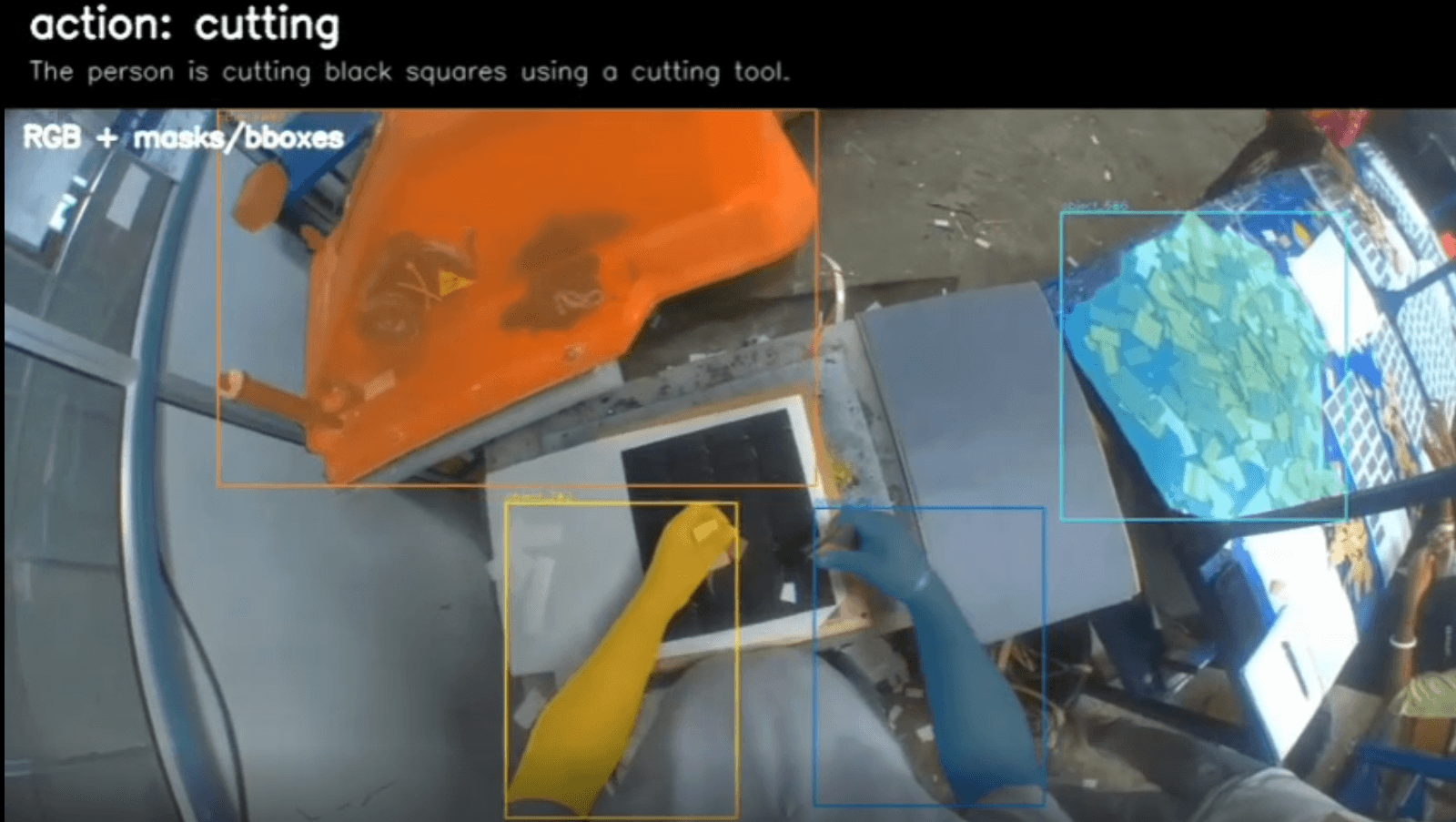
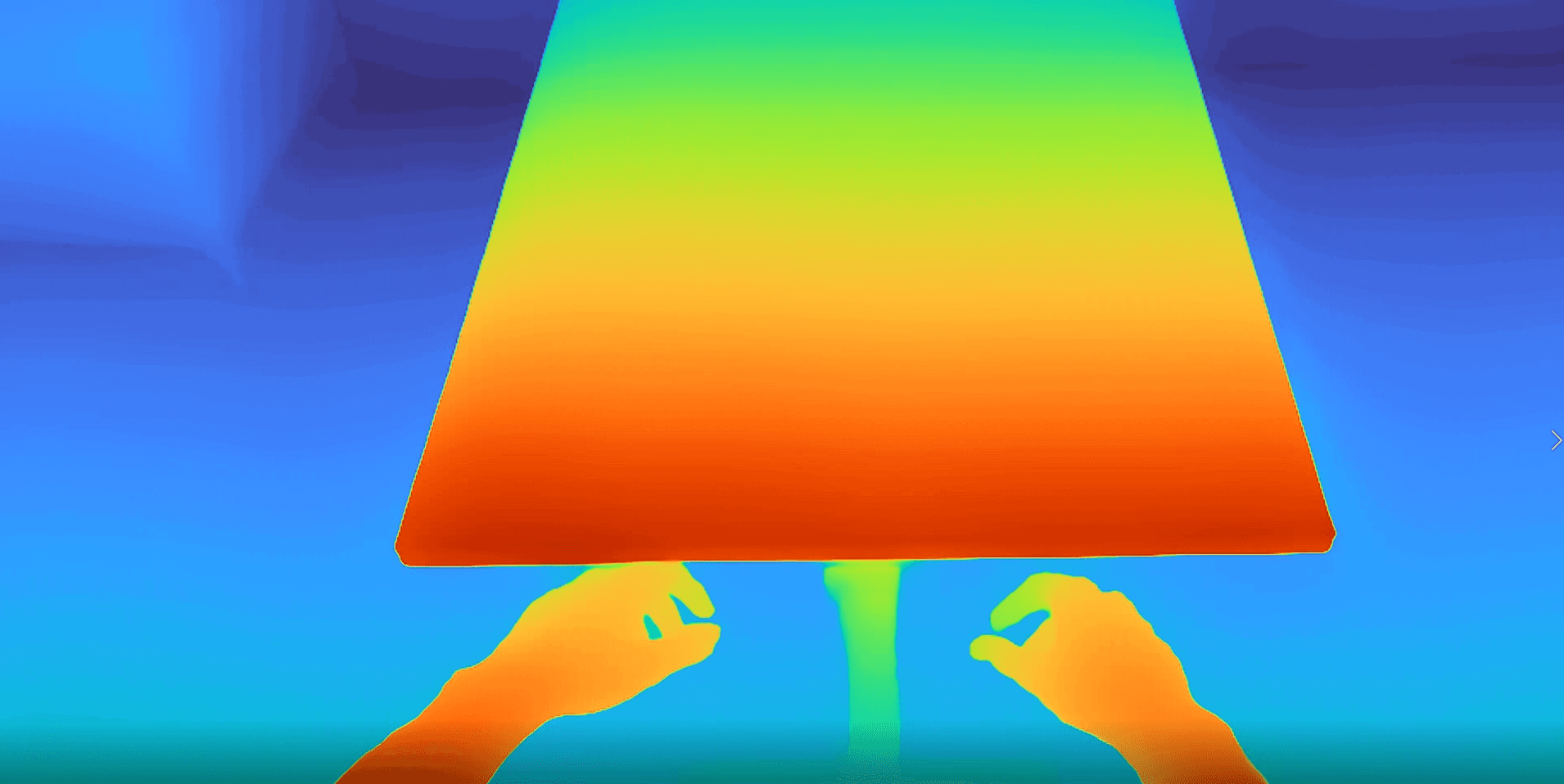
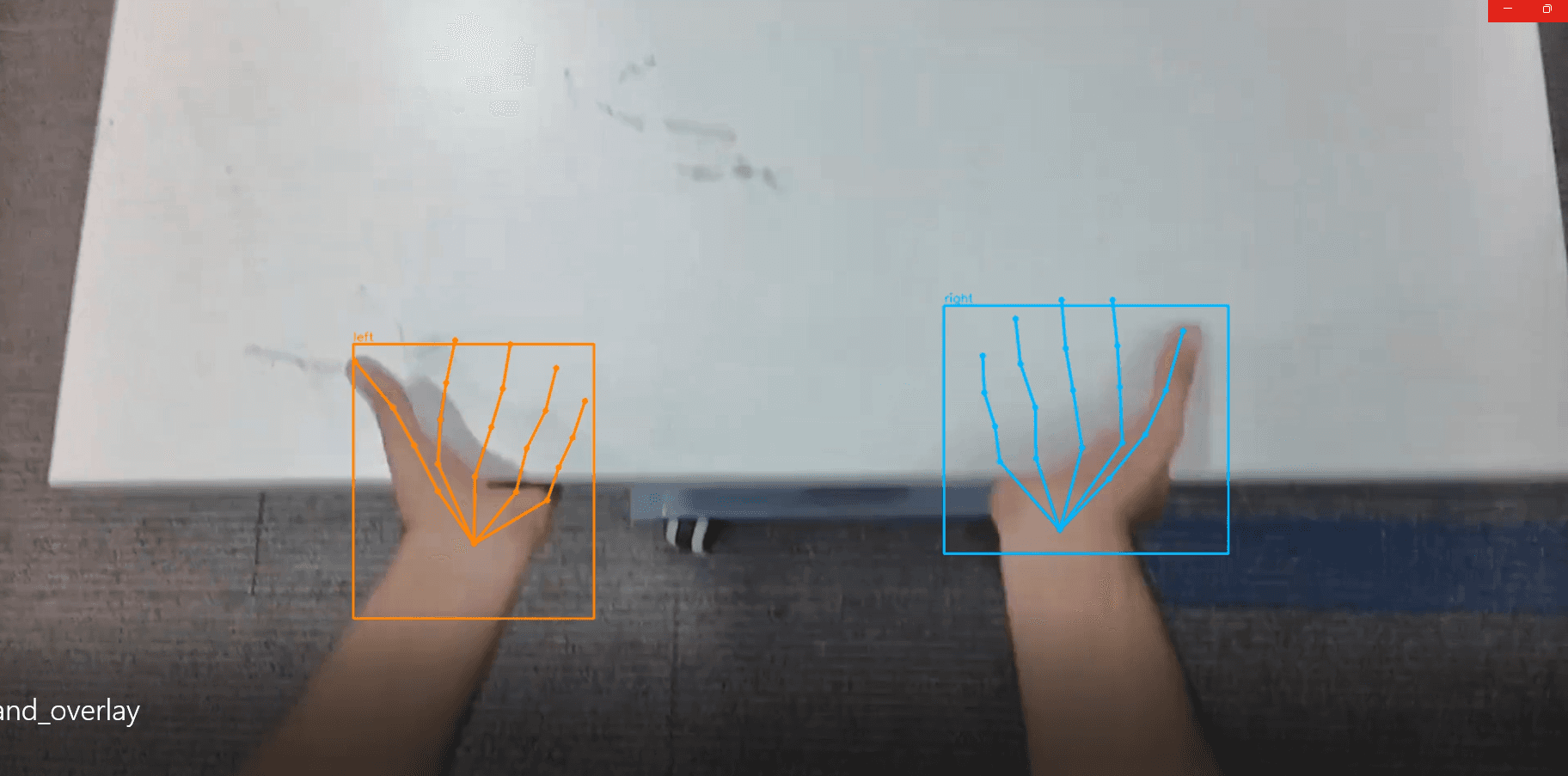
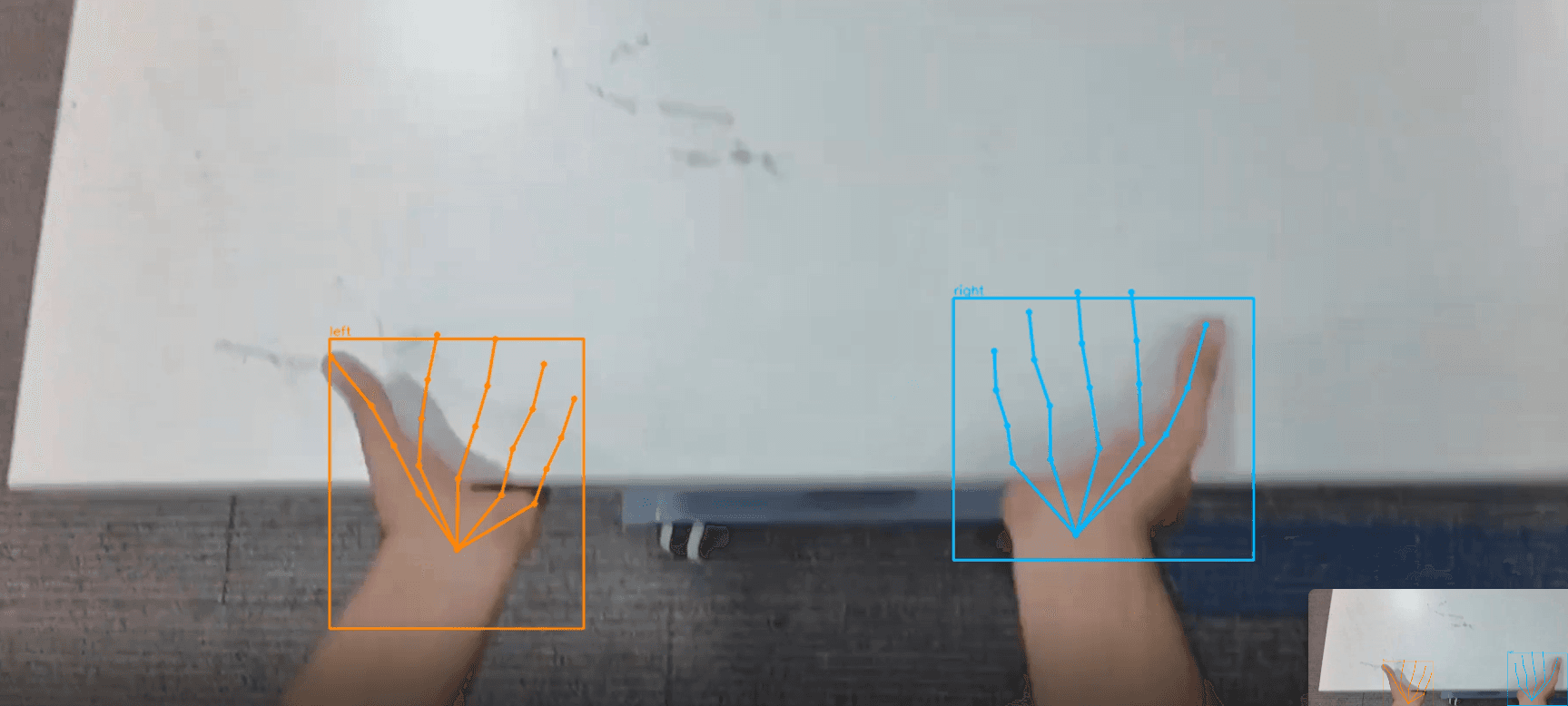
Image and video panels for VLA training data, telemetry, industrial process metadata, and process context moving through one industrial data surface.
// DATA STACK
Every Trekion delivery includes multimodal capture, process metadata, and annotations in formats your training and simulation pipelines already use. Below is the canonical schema for a single delivered episode.
synchronized RGB + supporting sensors
MES, historian, SCADA, ERP, DCS, PLC tags
state-action pairs, trajectories, dense action labels, 2D and 3D pose, object tracking
robot-transferable formats, sim-ready
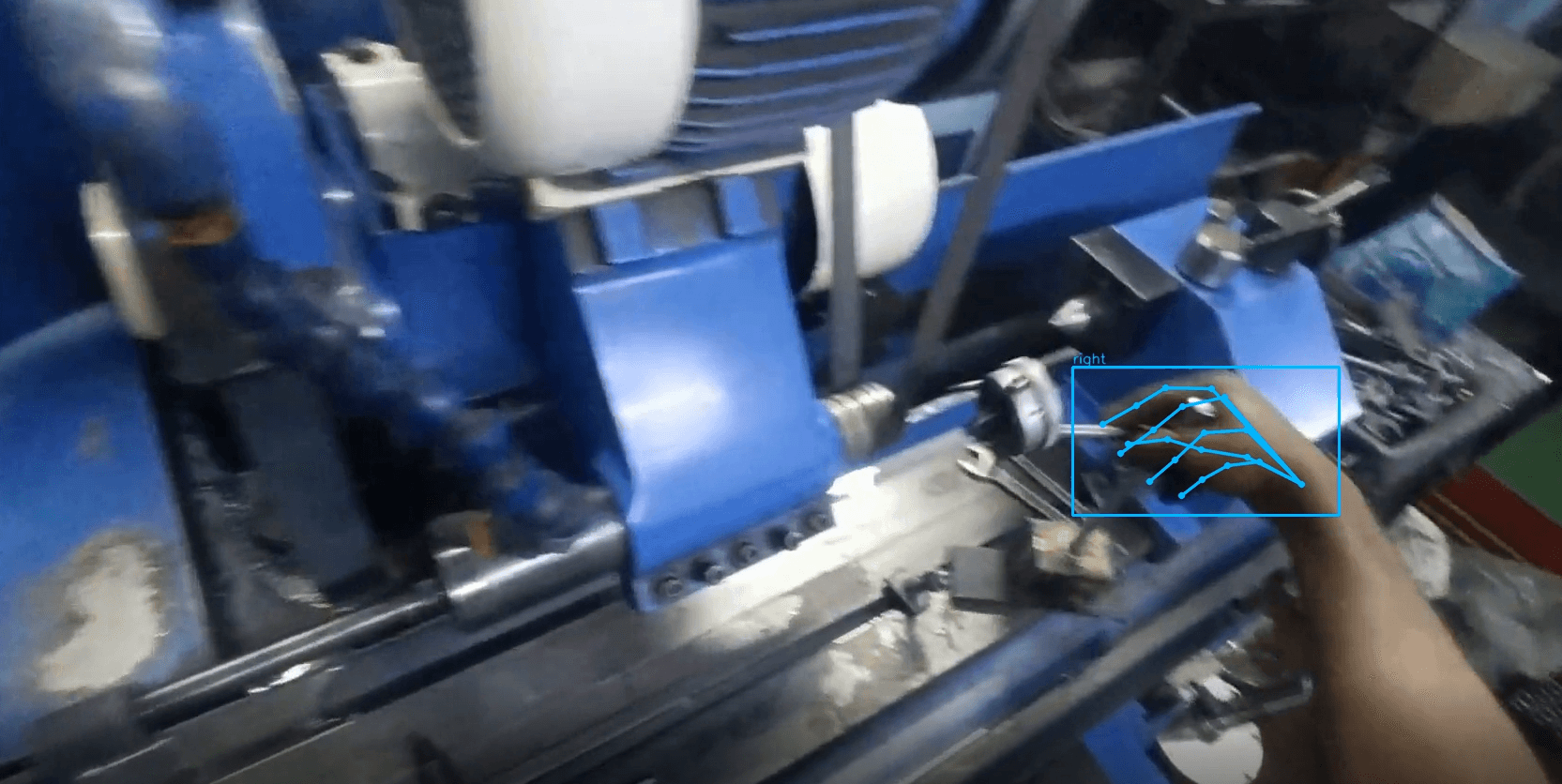
1{2 "episode_id": "trk-rfr-0048-2026-05-12",3 "facility_type": "oil_refinery",4 "vertical": "oil_and_gas",5 "workflow": "gas_detection_round",6 "sop_id": "API-RP-578-rev3",7 "duration_seconds": 412,8 "operators": 2,9 "modalities": ["rgb_left", "rgb_right", "depth", "audio"],10 "process_context": {11 "mes_link": true,12 "historian_link": true,13 "dcs_link": true,14 "tags_synced": 8415 },16 "annotations": {17 "state_action_pairs": 12380,18 "dense_action_labels": "verified",19 "pose_2d_3d": "hand_and_body",20 "object_tracking": "bbox_and_segmentation"21 },22 "delivery_format": "robot_transferable"23}sample frame: action labels overlay on real industrial workflow.
// schema preview, not an SDK. delivery format and field names finalized per engagement.
// HOW IT WORKS
A pipeline that turns industrial workflows into robotics foundation model data, trajectory data, and simulation/evaluation infrastructure.
// WHERE WE OPERATE
We focus on hazardous, regulated, and inspection-heavy environments where vertical robotics datasets are hardest to capture and easiest to misuse without process context.
Trekion builds construction robotics training data, discrete manufacturing robotics dataset coverage, oil and gas robotics inspection data, and refinery operations dataset for AI into one process-aware physical AI infrastructure layer. The vertical that pulls hardest gets the simulator and evaluation harness first.
Talk to Us// WHY TREKION
Industrial environments are hazardous, regulated, and physically inaccessible. Generic data pipelines do not reach them. We close the access gap, then the context gap, then build the simulator and evaluation harness that turns one vertical into a self-reinforcing data flywheel.
[ACCESS]
The Access Moat
Existing relationships across chemical plants, oil refineries, and heavy industry. Safety certifications, regulatory compliance, and facility trust make hazardous environment robotics data possible.
[CONTEX]
The Context Moat
Every dataset is synced with facility ERP/MES systems, SCADA data for AI training, historian data for robotics, and real-time process telemetry.
[ SIM + EVAL]
The Sim + Eval Moat
Real data is table stakes. The moat is the vertical-specific simulator that matches a plant's physics, layouts, and SOPs, plus the evaluation harness that measures policy performance against real operator benchmarks. We are building this with design partners. Three verticals are in active evaluation: discrete manufacturing, construction, and oil and gas. Whoever owns the sim and the harness for a vertical owns the data flywheel for it.
// WORK WITH US
Start with a pilot robotics dataset for your target processes. Scale into continuous physical AI infrastructure as your models, simulation and evaluation harnesses, and target workflows improve.
// PICK YOUR PATH
// LAB
Training models for industrial deployment? See the data schema, request a sample episode, and tell us which vertical you are training for.
// OPERATOR
Operating facilities where these robots will deploy? Partner with us as a data and pilot site, with safety, compliance, and procurement handled.
// INVESTOR
Following physical AI? Read the thesis, the roadmap, and the one-vertical bet. We are raising. We are also hiring.